NOMAD
An autonomous off-road vehicle for the DARPA Grand Challenge — stereo vision, sonar fusion, and real-time hazard avoidance, built on a stripped-down ATV.

Watch the offsets, avoid obstacles, go fast.
NOMAD was our run at the DARPA Grand Challenge: an autonomous off-road vehicle built on a stripped-down ATV — stereo vision reading the terrain, a forward sonar array flagging hazards, and a fusion layer deciding what to do about both in real time.
The machine
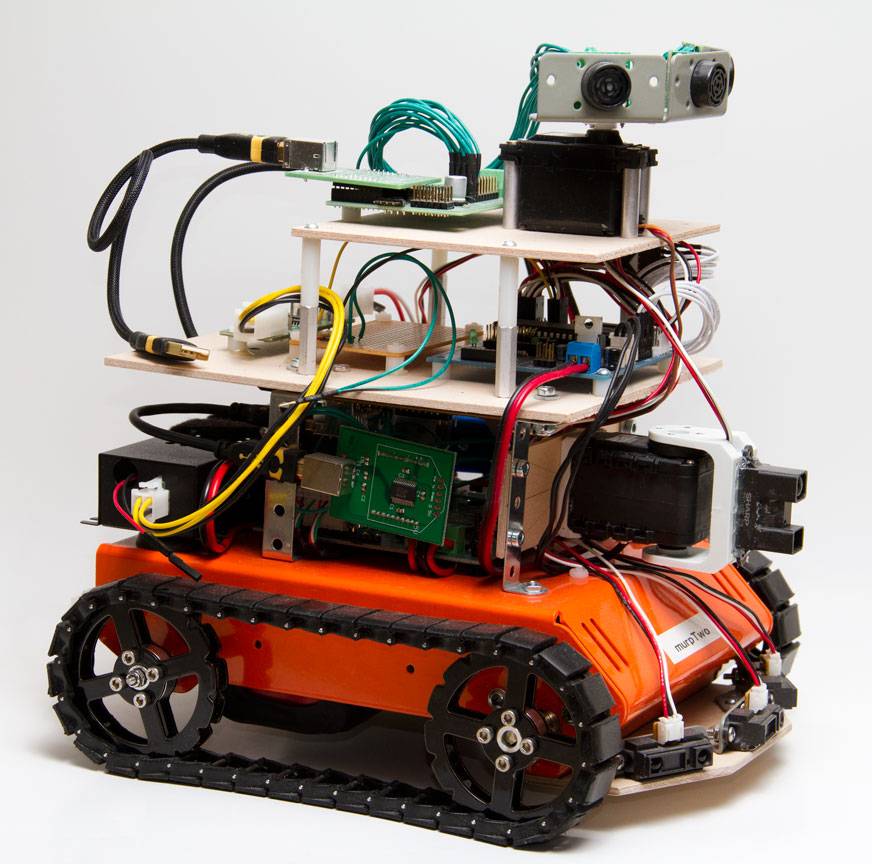
The platform was a Honda FourTrax Rincon, picked over a full-sized vehicle on purpose: a smaller footprint holds the track line and threads obstacles a truck has to plow through, and without a rider the center of gravity sits low and stable. 4WD, snorkeled for water crossings, electronic controls and start, automatic transmission — stripped down and rebuilt around the computing systems and sensor arrays.
Perception ran on two tracks. Calibrated stereo cameras fed a disparity engine that turned processed image pairs into 3D terrain data. A forward sonar array returned hazard vectors to the avoidance subsystem, which fused the two streams and decided on the most appropriate action.
How it ended
Autonomy at this scale runs on hardware, and hardware runs on money. To hit DARPA's March milestones we needed $40,000 in funding or parts by mid-February 2005. It never fully came together — we kept building at a slower pace, but the full-scale vehicle didn't make the deadline, and NOMAD never got to run its race.
The work outlived the vehicle. The project seeded the China Lake Unmanned Vehicle Association, which went on to become a swarm-robotics lab — the one machine we couldn't finish became a program that builds many smaller ones.
From the build log — winter 2005
01/30/05 — Forward Sonar Array Vectoring Subsystem
The forward sonar array vectoring algorithm came together this morning. The system accurately returns "hazard vectors" to the avoidance subsystem, so the main system can fuse that data and decide on the most appropriate action.
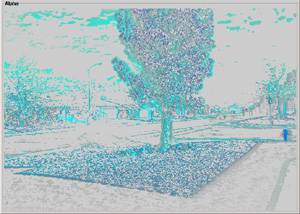
01/28/05 — Stereo Imaging Algorithm Progress
One of the first images out of the stereo imaging algorithm — a composite after convolutional and differential processing. There's quite a bit of noise in the sky: the cameras took the two source pictures at slightly different times on a cloudy day, so the exposures weren't identical. The calibrated video cameras will be far more precise and give much better detail. The gray area is the alpha channel of the final image; post-processing happens in a disparity engine that compares it against other images to produce the final 3D data.
01/22/05 — Milestone set for February 11
After today's meeting we concluded that to hit the March 11 deadline we'd need to raise $40,000 in hardware or funding by February 11 to meet DARPA's milestones. If we don't, the contingency is to continue at a slower pace and target the next Grand Challenge.
Potential vehicle selected. After deliberating over three ATV models (and some sponsorship snags), we chose the Honda FourTrax Rincon. It eases concerns about locking and unlocking differentials, and with extended A-arms we get great ground clearance. It'll be stripped down and rebuilt to hold the computing systems and sensor arrays.
![]()