A bit of history of the NOMAD project.
01/30/05
Forward Sonar Array Vectoring Subsystem
The Forward Sonar Array Subsystem Vectoring Algorithm has been worked out this morning. The system accurately returns “hazard vectors” to the avoidance subsystem so that the main system can add that information to the data fusing system to make decisions on the most appropriate actions to take.
01/28/05
Stereo Imaging Algorithm Progress
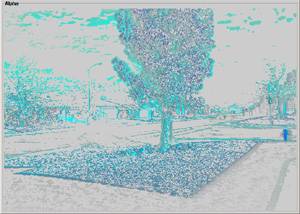
Here is one of the first images from the stereo imaging algorithm. The image shows one of the composite images after convolutional and differential processing. This image shows quite a bit of noise in the sky area. The cameras actually took the two original pictures at different times on a cloudy day, so the exposures were not identical. The images from the calibrated video cameras will be much more precise and therefore result in better image detail.
The gray area is the alpha channel of the final image. Post-processing of this image occurs in a disparity engine, which compares it with other images to get the final 3D data.
01/22/05
Project Milestone set for February 11
After today’s meeting, we came to the conclusion that to make the March 11 deadline, we would have to collect $40,000.00 in hardware or funding by February 11 in order to meet DARPA’s March 11 milestones. If we do not reach this mark, our contingency plan is to continue our effort at a slower pace targeting the next DARPA Grand Challenge.
We are doing all we can to meet the March 11 milestones, as we are confident we can meet the challenge this year if funding permits.
Potential Vehicle Selected.
After deliberating over 3 ATV Models (and some sponsorship problems), we have chosen the Honda FourTrax Rincon for the platform. While not set in stone, we feel this platform will be our best option for the conditions we are working under. Its features will cut down on a few concerns we had about locking and unlocking differentials, and with the addition of extended a-arms, we can get great ground clearance. This vehicle will be stripped down and re-built to hold the computing systems and sensor arrays.
Why not a full-sized vehicle? We’re convinced that the smaller footprint will be a major asset when navigating obstacles and keeping the track line. The Honda has 4-wheel drive, is snorkeled for water passings, and has ample power and payload capacity, electronic controls, electronic start, and automatic transmission. Without a rider, the center of gravity is lowered to a very stable level.
We are still open to sponsorships on the platform. If you feel you have a better platform, and would like to sponsor the NOMAD Project, we would be happy to consider it.

![]()
![]()